INVESTIGACIÓN
El Instituto de Automática revoluciona el guiado de vehículos marinos
Investigadores del Instituto de Automática (INAUT), desarrollaron un novedoso sistema de control predictivo para vehículos marinos autónomos. El método combina la planificación de trayectorias eficientes en tiempo real con algoritmos de evasión de obstáculos de alta confiabilidad. Este avance optimiza la navegación autónoma en escenarios marítimos complejos y dinámicos.
{kind=link}
El avance de la robótica marítima ha alcanzado un nuevo hito gracias a una innovadora investigación que optimiza el trazado de rutas y el control de embarcaciones robóticas en entornos dinámicos. Científicos del Instituto de Automática (INAUT) desarrollaron un método de vanguardia que permite a los vehículos autónomos de superficie navegar de forma más rápida, suave y segura, superando las limitaciones de los sistemas de guiado tradicionales.
El desafío de las corrientes y los giros en el mar
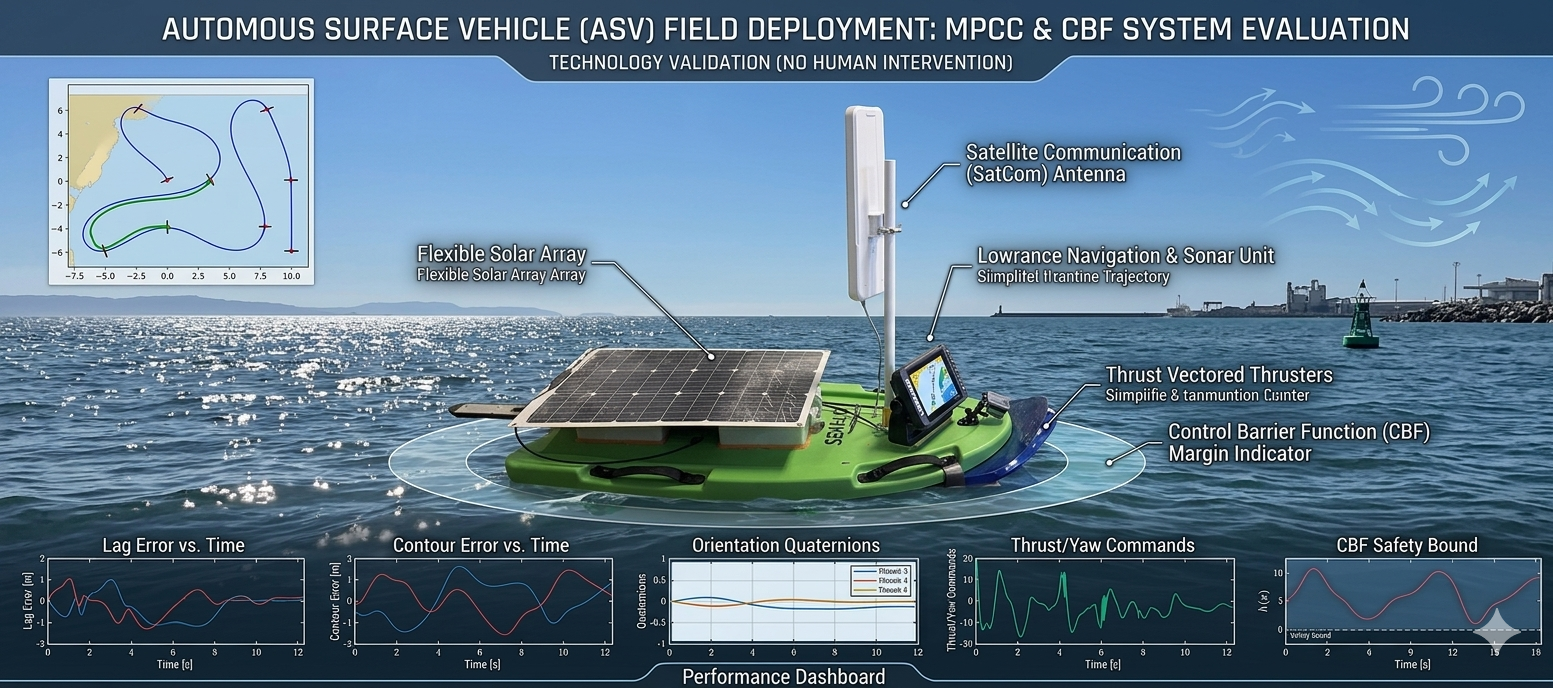
Los Vehículos Autónomos de Superficie (ASVs, por sus siglas en inglés) se utilizan cada vez más en tareas esenciales como el monitoreo ambiental, la recolección de datos oceanográficos y la vigilancia de puertos. Sin embargo, a diferencia de los drones aéreos o los vehículos terrestres, estas embarcaciones se enfrentan a un entorno hostil caracterizado por el viento, las olas y complejas fuerzas hidrodinámicas que dificultan enormemente su control exacto.
Los enfoques convencionales basados en "puntos de ruta" fijos suelen obligar al vehículo a realizar maniobras excesivamente conservadoras o matemáticamente imposibles debido a que no consideran la física real del barco.
Para resolver este problema, el equipo de investigación propuso un enfoque integrado que combina dos herramientas avanzadas: la planificación de trayectorias en tiempo óptimo y el Control Predictivo por Contorneo (MPCC). El desarrollo se estructura en torno a tres pilares fundamentales:
-
Desacoplamiento geométrico y temporal: Mediante una parametrización basada en la longitud del arco, el sistema separa la geometría del camino de la velocidad con la que se recorre. Esto permite ajustar el progreso en tiempo real según las capacidades del vehículo.
-
Optimización de tiempo y esfuerzo: En lugar de forzar soluciones extremas, el algoritmo busca una eficiencia temporal equilibrada. Esto mitiga el desgaste de los actuadores (motores y timones) y garantiza un viaje fluido.
-
Garantía absoluta de seguridad: El sistema incorpora "Funciones de Barrera de Control" de alto orden. Estas funciones actúan como un escudo matemático invisible que impide de forma estricta que la embarcación se acerque a obstáculos fijos o móviles más allá de un margen de seguridad predefinido.
Las simulaciones numéricas demostraron que, incluso ante giros cerrados y derrapes laterales provocados por el agua, el controlador adapta la marcha manteniendo un seguimiento impecable de la ruta sin poner en riesgo la integridad de la plataforma.
El equipo de autores estuvo conformado por los investigadores Bryan S. Guevara, José Varela-Aldás, Angélica V. Quito, Brayan Saldarriaga, Javier Gimenez y J. Marcos Toibero. Con estos resultados, el INAUT consolida su posicionamiento en el desarrollo de tecnologías clave para el sector productivo marítimo y la investigación oceanográfica del futuro.