INVESTIGACIÓN
Innovación en robótica marina: Diseñan un sistema de control eficiente para vehículos autónomos de superficie
El Instituto de Automática (INAUT) desarrolló una estrategia de navegación jerárquica para embarcaciones autónomas no tripuladas, optimizando el procesamiento a bordo y garantizando estabilidad frente a perturbaciones climáticas.
{kind=link}
El Instituto de Automática (INAUT), institución de doble dependencia entre el Consejo Nacional de Investigaciones Científicas y Técnicas (CONICET) y la Universidad Nacional de San Juan (UNSJ), ha liderado el desarrollo de un avanzado sistema de guiado y navegación para vehículos marinos no tripulados. Este importante trabajo científico se llevó a cabo en colaboración con investigadores de la Universidad de los Llanos (Colombia) y la Universidad Politécnica Salesiana (Ecuador), consolidando los lazos de cooperación internacional en el ámbito de la investigación avanzada.
El estudio presenta una estrategia de control jerárquico aplicada a un Vehículo Autónomo de Superficie (USV, por sus siglas en inglés) de propulsión diferencial. Estas embarcaciones operan en el agua sin necesidad de una tripulación a bordo y resultan esenciales para el desarrollo de misiones complejas debido a su versatilidad y capacidad operativa en entornos hostiles:
-
Monitoreo ambiental e investigación oceanográfica: Permiten recolectar datos fundamentales en aguas remotas o peligrosas de forma prolongada y sin poner en riesgo vidas humanas.
-
Relevamientos hidrográficos: Facilitan el mapeo del relieve submarino, la topografía costera y el estudio detallado de los cuerpos de agua.
-
Búsqueda, rescate y seguridad: Optimizan las tareas de patrullaje e inspección marítima gracias a su capacidad de despliegue continuo y autónomo.
Eficiencia frente a los métodos de Inteligencia Artificial
Dentro de la línea de investigación en control de robots y modelado y control de procesos, el equipo de científicos centró su enfoque en el diseño basado en leyes físicas directas (modelos de caja blanca). Esto representa una alternativa clave frente a las tendencias actuales que recurren de forma exclusiva a la Inteligencia Artificial (IA) o al aprendizaje profundo, los cuales imponen altas demandas tecnológicas:
-
Bajo costo computacional: A diferencia de las redes neuronales pesadas, la estrategia propuesta requiere recursos de procesamiento mínimos, lo que viabiliza su ejecución en tiempo real dentro de microcontroladores estándar o computadoras de placa única convencionales como una Raspberry Pi.
-
Interpretabilidad matemática: Al fundamentarse en ecuaciones físicas consolidadas, todos los parámetros poseen un significado real, simplificando significativamente las tareas de calibración, sintonía y validación del guiado del robot.
-
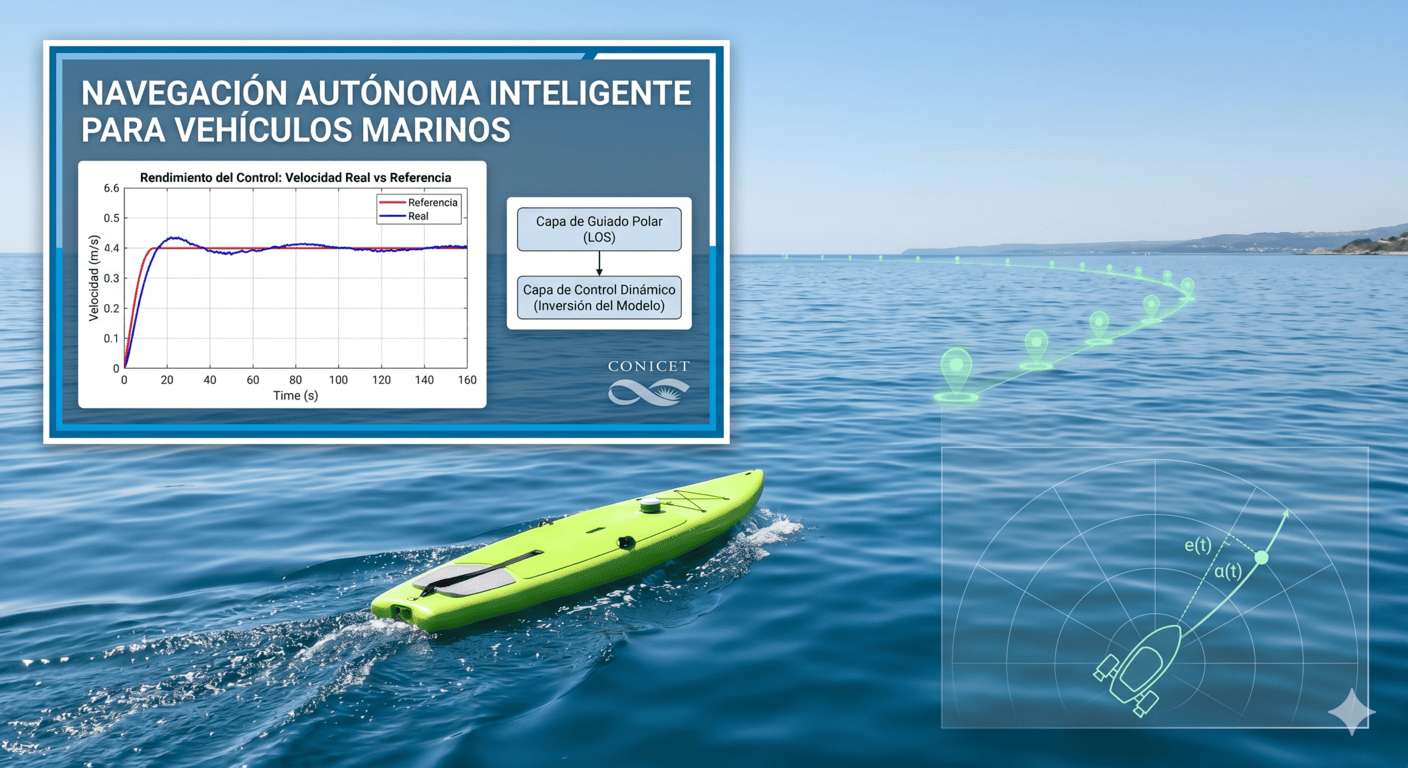
Estructura jerárquica de dos niveles: El sistema combina un algoritmo de guiado de Línea de Vista (LOS) formulado en coordenadas polares para calcular el rumbo hacia los puntos de destino (bucle externo), con una capa de compensación dinámica que corrige de forma automática los efectos del oleaje y las fuerzas hidrodinámicas (bucle interno).
A diferencia de las alternativas tradicionales basadas puramente en inteligencia artificial que exigen computadoras de alto costo a bordo, esta propuesta se destaca por su bajo requerimiento de procesamiento. Esto viabiliza su implementación directa en microcontroladores comerciales estándar, optimizando el uso de recursos energéticos en misiones prolongadas de monitoreo ambiental, seguridad y relevamiento hidrográfico.
Validación experimental y entornos virtuales
La efectividad del esquema de control fue validada rigurosamente tanto en escenarios reales como a través de herramientas de simulación y realidad virtual, demostrando un excelente rendimiento técnico:
-
El prototipo físico IAcquaBot: Es una embarcación real desarrollada por el Equipo de Robótica Marina del INAUT, construida sobre una base aerodinámica y equipada con dos propulsores simétricos, un sistema de posicionamiento GPS/IMU y una unidad de procesamiento central integrada.
-
El simulador digital IAcquaBotSim: Un gemelo virtual implementado en el entorno especializado VRX, utilizado para recrear con exactitud las dinámicas de navegación y verificar la respuesta del sistema ante fallas o entornos climáticos adversos.
-
Resistencia a perturbaciones ambientales: Los ensayos demostraron que el vehículo autónomo es capaz de seguir con precisión trayectorias complejas compuestas por múltiples puntos de referencia, manteniendo una estabilidad sobresaliente incluso al ser sometido a fuerzas externas severas que emulan ráfagas de viento y fuertes corrientes marinas.
De este modo, la convergencia exitosa entre los ensayos virtuales y las pruebas de campo no solo convalida la solidez de las teorías físicas aplicadas, sino que también sienta un precedente clave para el futuro de la automatización marina en el país. Este desarrollo demuestra que es posible generar tecnología robusta y de alta complejidad con recursos tecnológicos eficientes, consolidando la capacidad del instituto para transferir conocimiento científico directo hacia soluciones prácticas que impacten positivamente en los sectores productivos y ambientales estratégicos.