INVESTIGACIÓN
Investigadores del INAUT desarrollan un sistema de navegación inteligente para mejorar la autonomía de vehículos eléctricos
Investigadores del INAUT diseñaron un método que combina diferentes técnicas de visión computarizada para que los vehículos autónomos puedan ubicarse con mayor precisión, incluso en entornos complejos
{kind=link}
Uno de los mayores desafíos para los vehículos autónomos es saber exactamente dónde se encuentran y qué hay a su alrededor en tiempo real. Para lograr esto, utilizan sistemas denominados SLAM (Localización y Mapeo Simultáneos), que funcionan como los "ojos" y el "cerebro" del vehículo. Sin embargo, estos sistemas suelen fallar cuando hay cambios bruscos de iluminación o cuando el terreno no tiene suficientes puntos de referencia.
Ante este problema, un equipo de investigación del Instituto de Automática (INAUT), dependiente del Consejo Nacional de Investigaciones Científicas y Técnicas (CONICET) y la Universidad Nacional de San Juan (UNSJ), desarrolló un nuevo marco de trabajo que combina dos métodos de visión que antes funcionaban por separado.
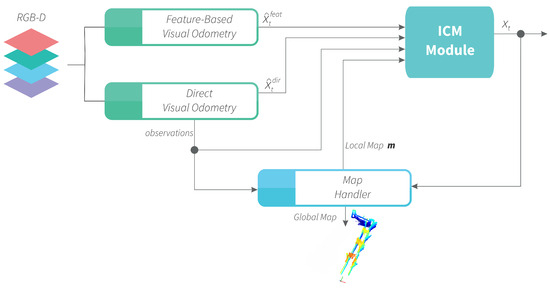
El sistema propuesto fusiona la "odometría visual directa", que analiza los cambios de brillo en toda la imagen, con la "indirecta", que se enfoca en puntos específicos como esquinas o bordes de objetos. Para unir estas dos fuentes de información de manera eficiente, los especialistas utilizaron un algoritmo matemático basado en Campos de Marcov Iterativos (ICM), que permite corregir errores y obtener una trayectoria mucho más fluida y exacta.
"El objetivo es que el vehículo no pierda el rumbo cuando las condiciones del entorno son difíciles, como en pasillos con paredes lisas o lugares con sombras profundas", explicaron los autores del estudio publicado en la revista científica World Electric Vehicle Journal.
Para validar el avance, el equipo realizó pruebas utilizando un vehículo eléctrico Sero Electric Sedan y bases de datos internacionales. Los resultados obtenidos demostraron que este nuevo enfoque supera en estabilidad a los métodos convencionales, reduciendo significativamente el error en la estimación de la posición. Este desarrollo representa un paso clave para la llegada de una navegación autónoma más segura y confiable en entornos urbanos e industriales.